Last Modified: 2023-Jun-29
Remember to right click->"open image in new tab" for small images
Índice
Wed May 3 04:04:51 PM CEST 2023
The cell graph
In order to simulate the cell network, we need realistic data of base stations’ positions. The closer we have:
Data from opencellID integrated.
There’s a range field, but it’s 1km in most of the samples, which results in cells being at one jump from each other. 
Using sphere of influence algorithm : 
But still, there are some islands, I will apply the same sphere of influence, but with the second closer node as a range d6918b8 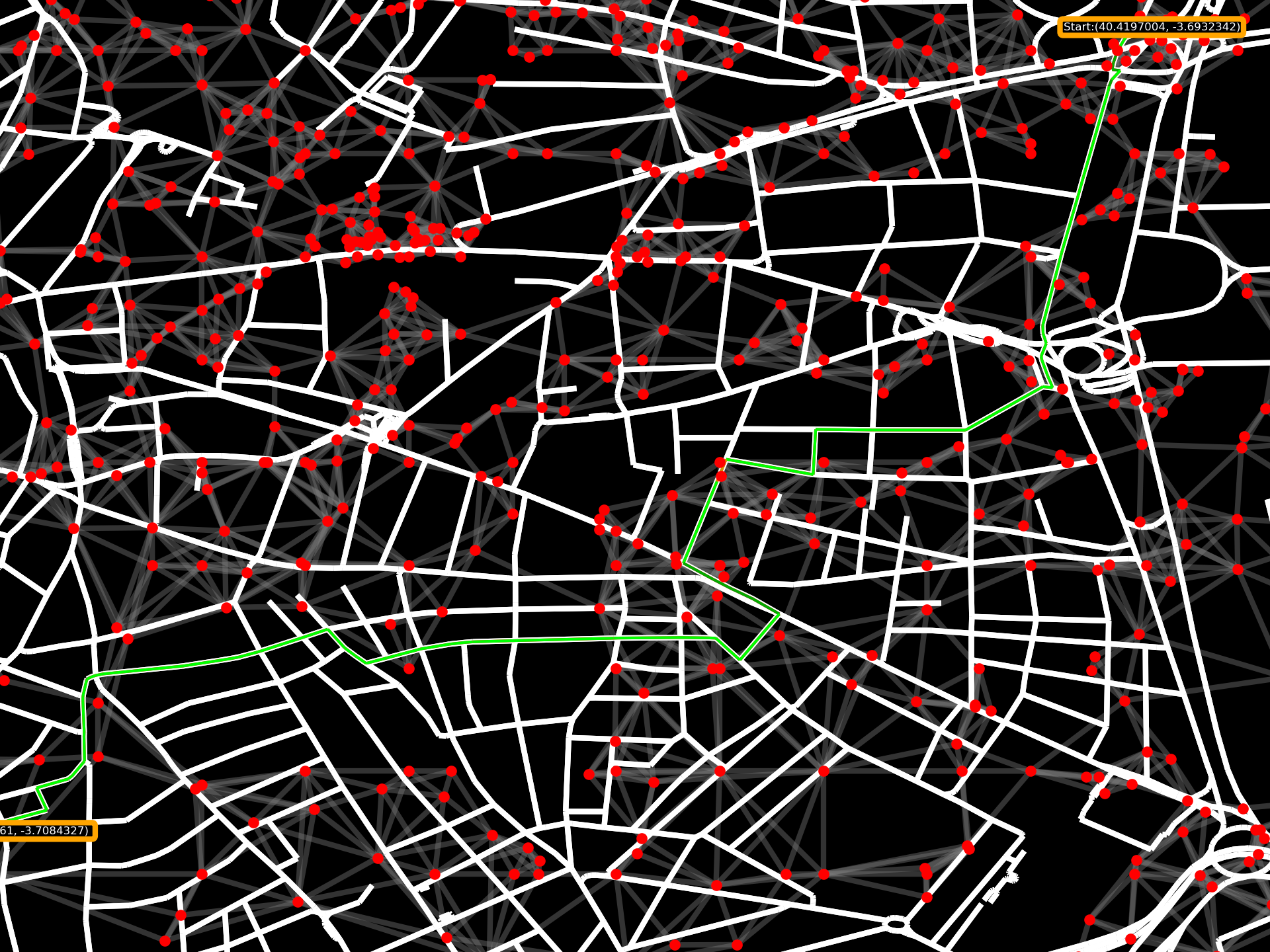
A better graph is obtained, at first glance, no isolated graphs. Just in case, I will search for them dd6bf45.
> python main.py
...
No Unreachable nodes in base station graph
...
Sun May 7 05:21:53 PM CEST 2023
Shortest path
The sphere of influence algorithm doesn’t guarantee that all of the map will be covered by the ranges of each node.
TODO - better way to make the graph
Steps to solve the shortest path
- Choose the origin and end nodes
Done - Find the closest base station to each node
Done -
BSpath(in transparent yellow) - Find shortest distance in the base station graph,
Done7661ee4 This way, we minimize the number of cells required, in the real life scenario, each cell will have a limited number of clients with the requirements needed for a remote drive. Hence, the less cells required, the more hypothetical cars/travels will be able to drive/perform at the same timecShPath=nx.dijkstra_path(Gt,bSStart,bSEnd) #weights = 1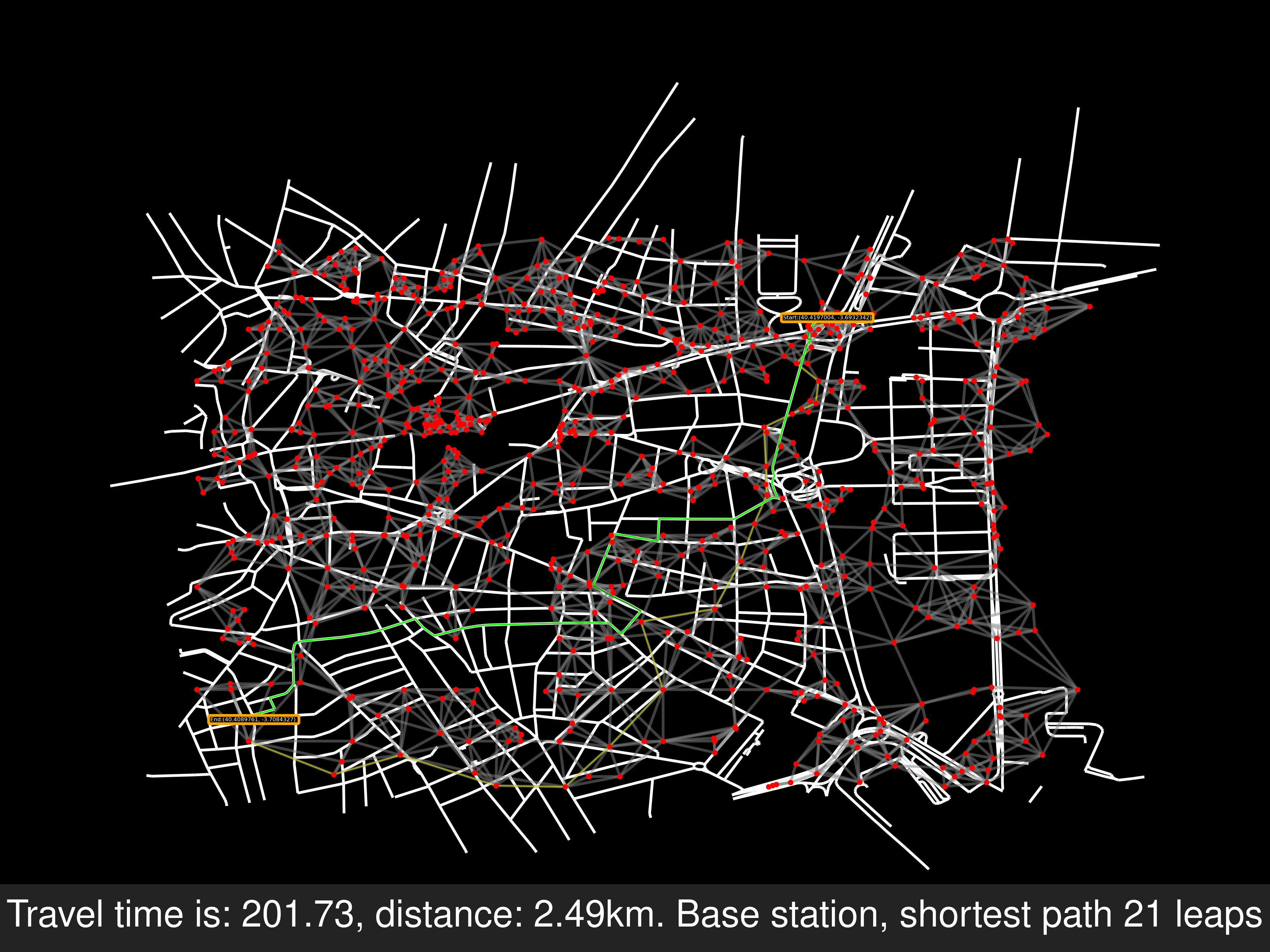 Telefonica, orange and vodafone. From left to right
Telefonica, orange and vodafone. From left to right


- Add a field to each road, ¿¿distance to the closer base station in the shortest BSpath ??. Discard roads outside of each base station’s range
TODO - Calculate the shortest road route with the updated weights,
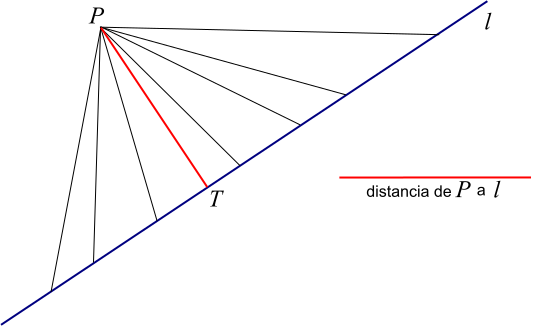
TODOPoint to Line Algorithm
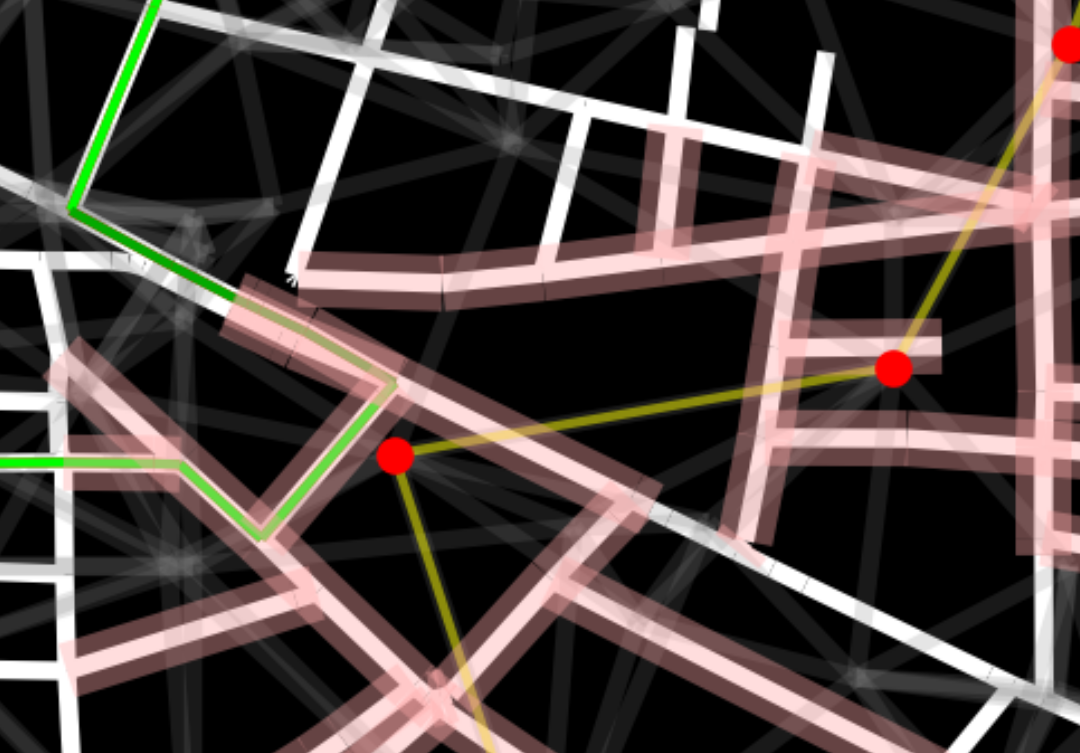
As in the image below, I will get the distance for 5 points per edge and discard the way if the point is outside of any cell’s range
Because the range was defined when the sphere of influence was applied, if there are cells very close to each other, the range will be defined very short, hence, a voronoi-like distance, not overriding the range, instead of sphere of influence will be used in another example
Mon May 8 08:22:52 AM CEST 2023
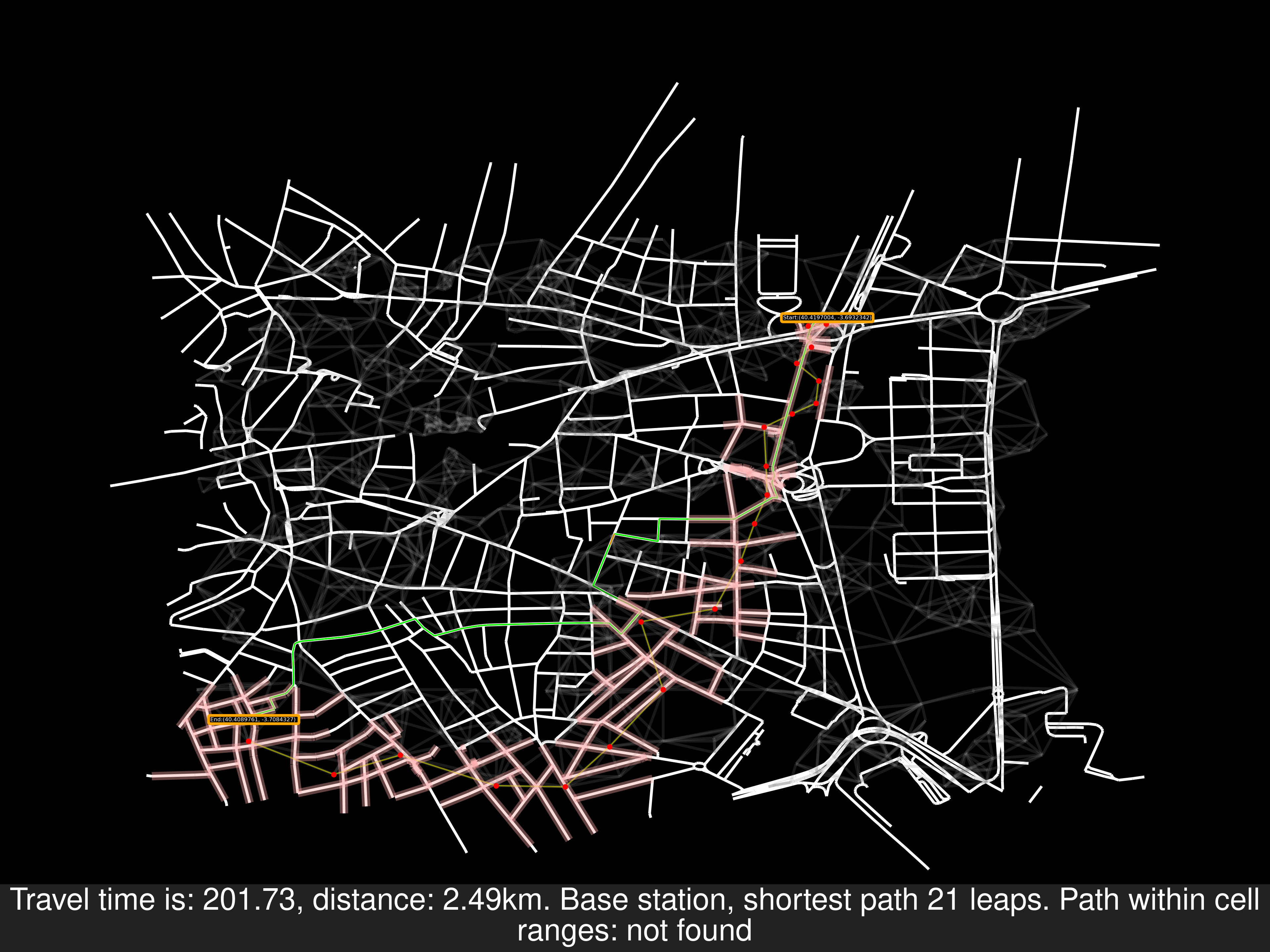
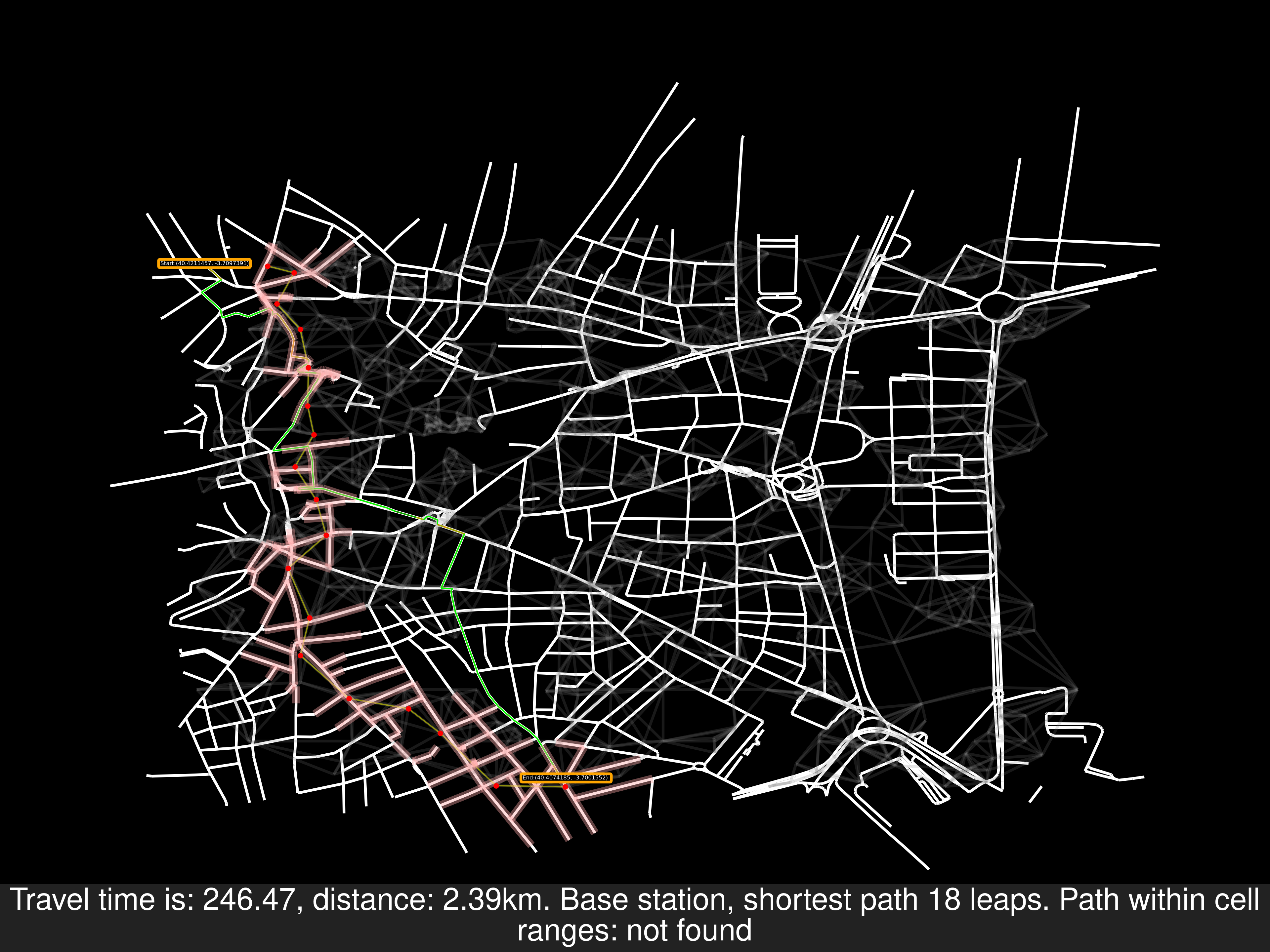
The requirement in points to line algorithm is too restrictive, as can be seen, a path from origin to end in the road graph can’t be found, this isn’t neccesarily bad. We would just need to calculate another path within the cell’s network.
f74f1b8

Modifying the requirement
08d9f71
Before adding an algorithm to find another cell network, I will modify the requirement soi. A way is acceptable, if any point within a road is inside the cell’s range

Shortest path withing allowed roads
From the initial steps and the modified condition, the initial and final road nodes will be inside the allowed roads. This should be straight forward, it isn’t
Other examples of random routes, one of them disproves that the starting node will necessarily be covered by a cell area: As a reminder, these problems have their origin in the SOI algorithm
Sooner or later this would appear, there’s a gap in the coverage of the cells therefore a better algorithm is needed.
A better algorithm
As seen in the data, most cells are close to roads, it’s very likely that the gap in the coverage between two cells will be 1 or 2 cells away from being circumvented, it doesnt make much sense to perform the shortest path between the origin and end cells.
shortest_cell_route=[ cell0, cell1, cell2, cell3, cell4]
...
move_inRoad_from_to(cell0,cell4)
...
//Can't move from cell1 to cell2 through the roads
remove_edge_between(cell1,cell2)
new_route=find_shortest_route_between(cell1,cell2)// or just find a new route
shortest_cell_route=[cell0,cell1,cell5,cell7, cell2, cell3, cell4]
...
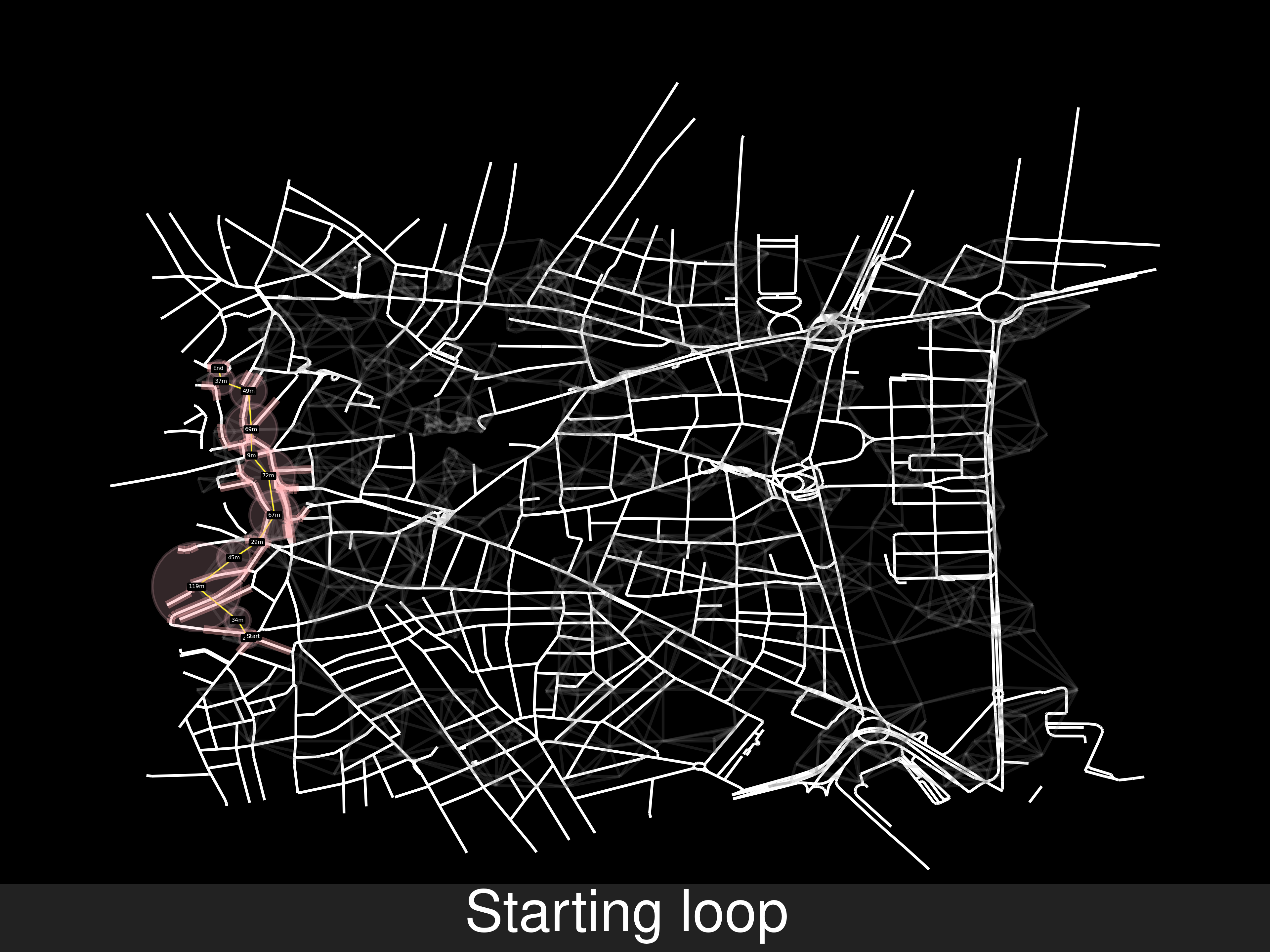
Wed May 10 10:26:42 PM CEST 2023
5797efa

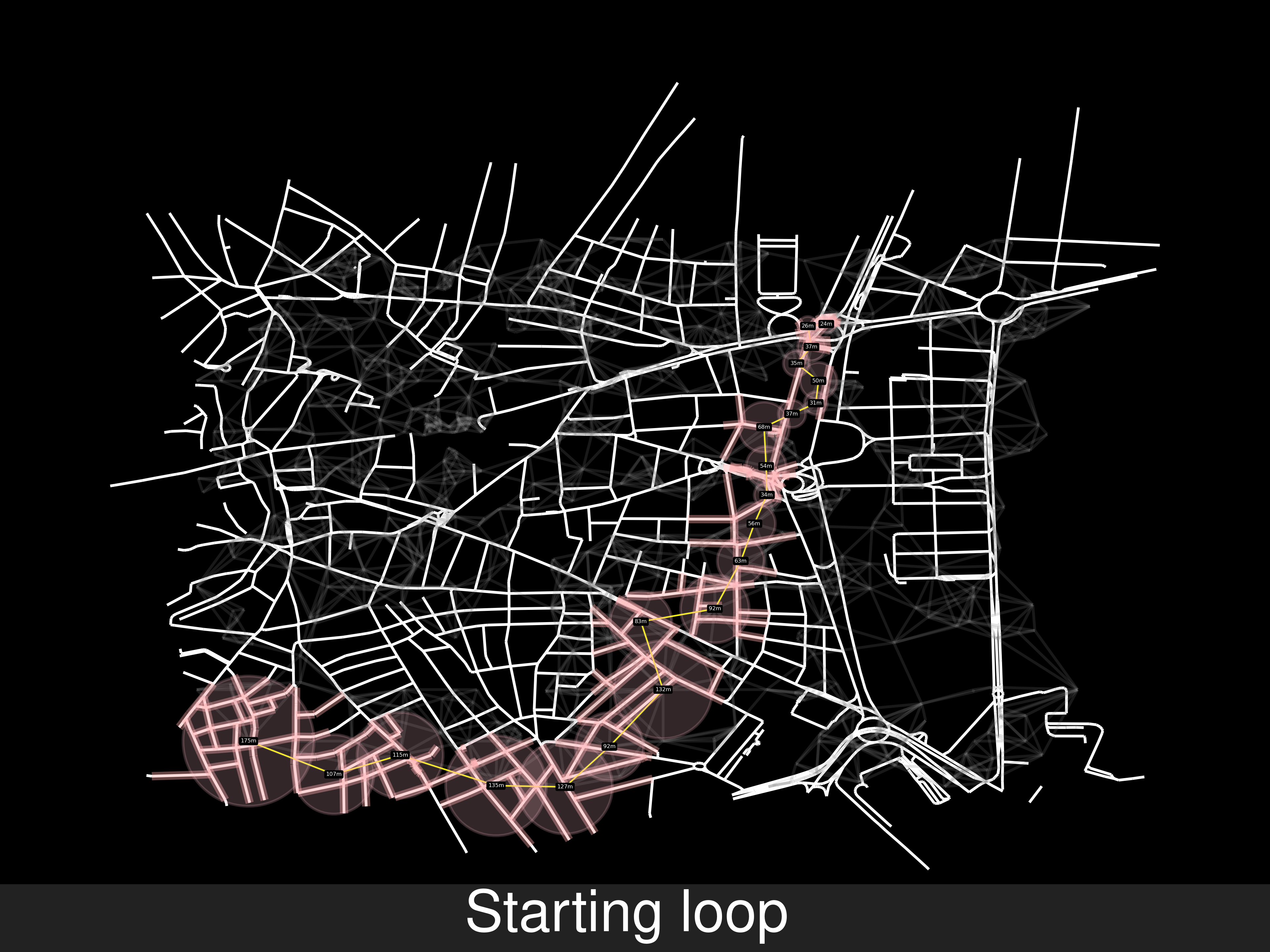
 Gif with the sequence of steps, it’s 26MB, this page is big enough 😼.
Gif with the sequence of steps, it’s 26MB, this page is big enough 😼.
{kind=link}
-
This approach doesn’t work that well.
find_shortest_route_betweendoesn’t prove there’s a road path from where the car leaves cell0, joins and leaves cell1 and can join cell2. For that we would need to find the shortest route from some node of cell0 and some node of cell2, then cell3… until the last node -
Anyway, I will just find the shortest path between cel0 and cell4, instead of just the two cells unreachable cells. Now there’s another problem, yes, we know whether the starting node can reach the ending one, but we can’t pinpoint which pair of cells have unreachable nodes.
Merging both solutions: 3b887d3
-
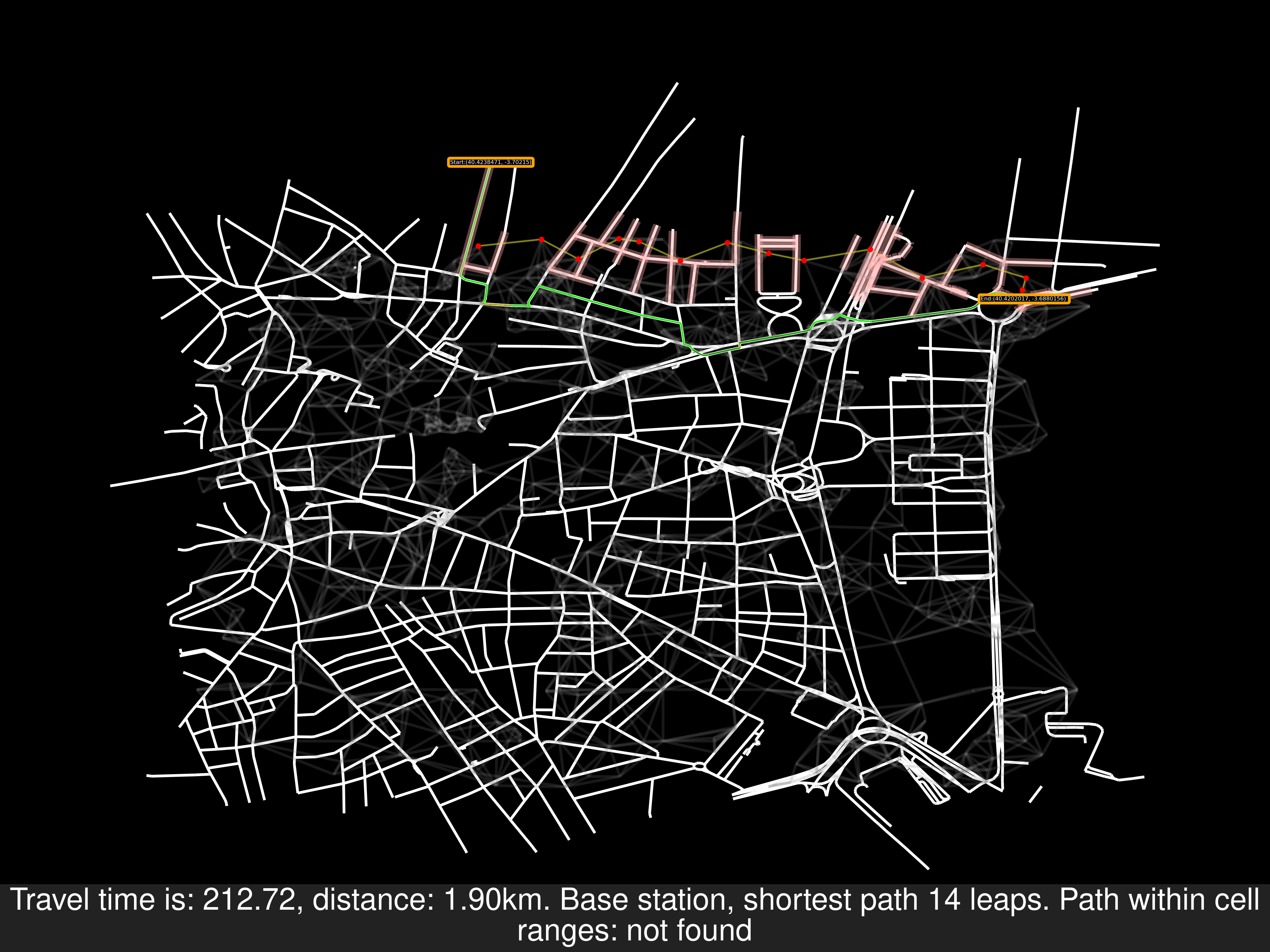
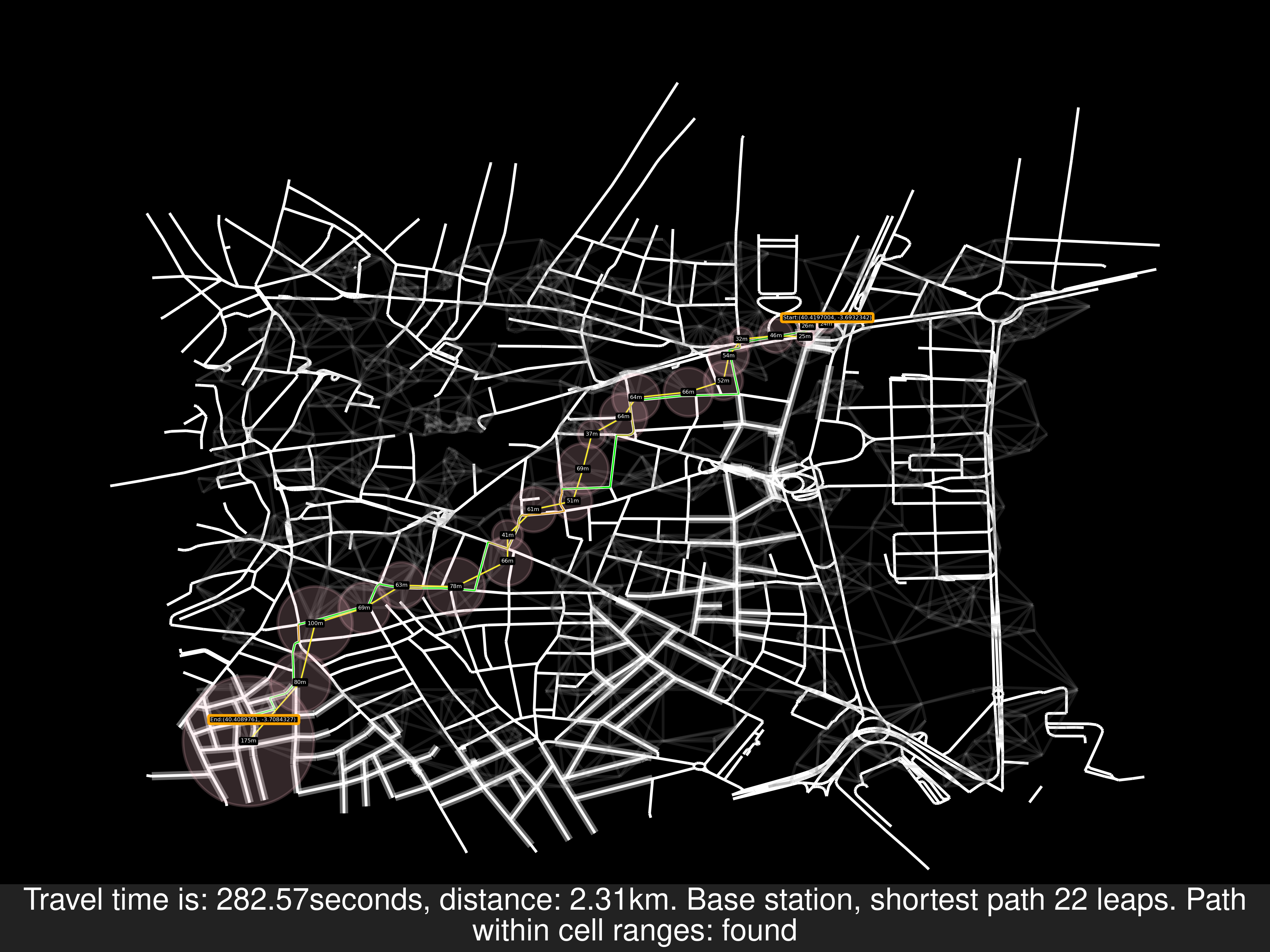
Example A of route solving


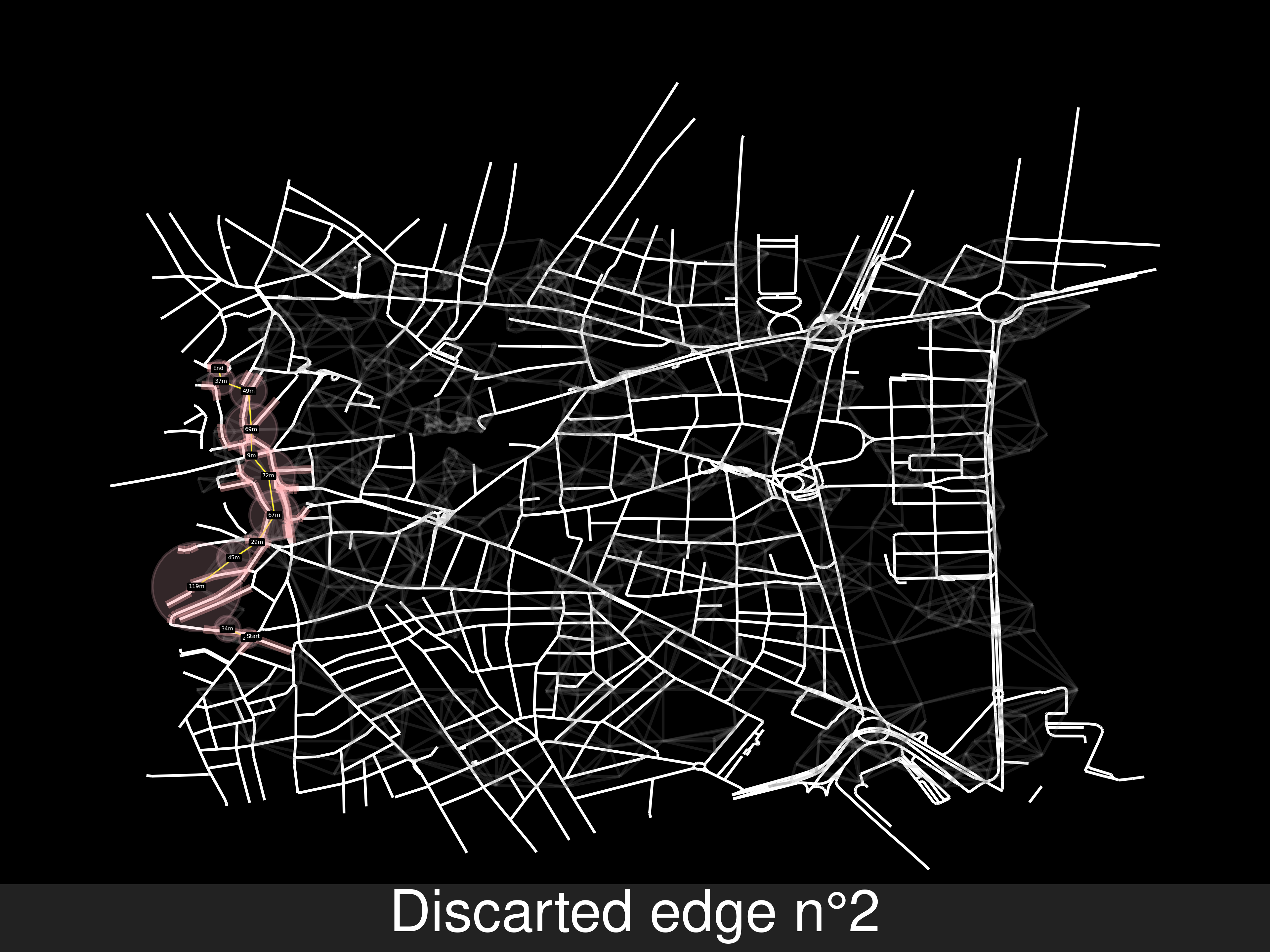
-
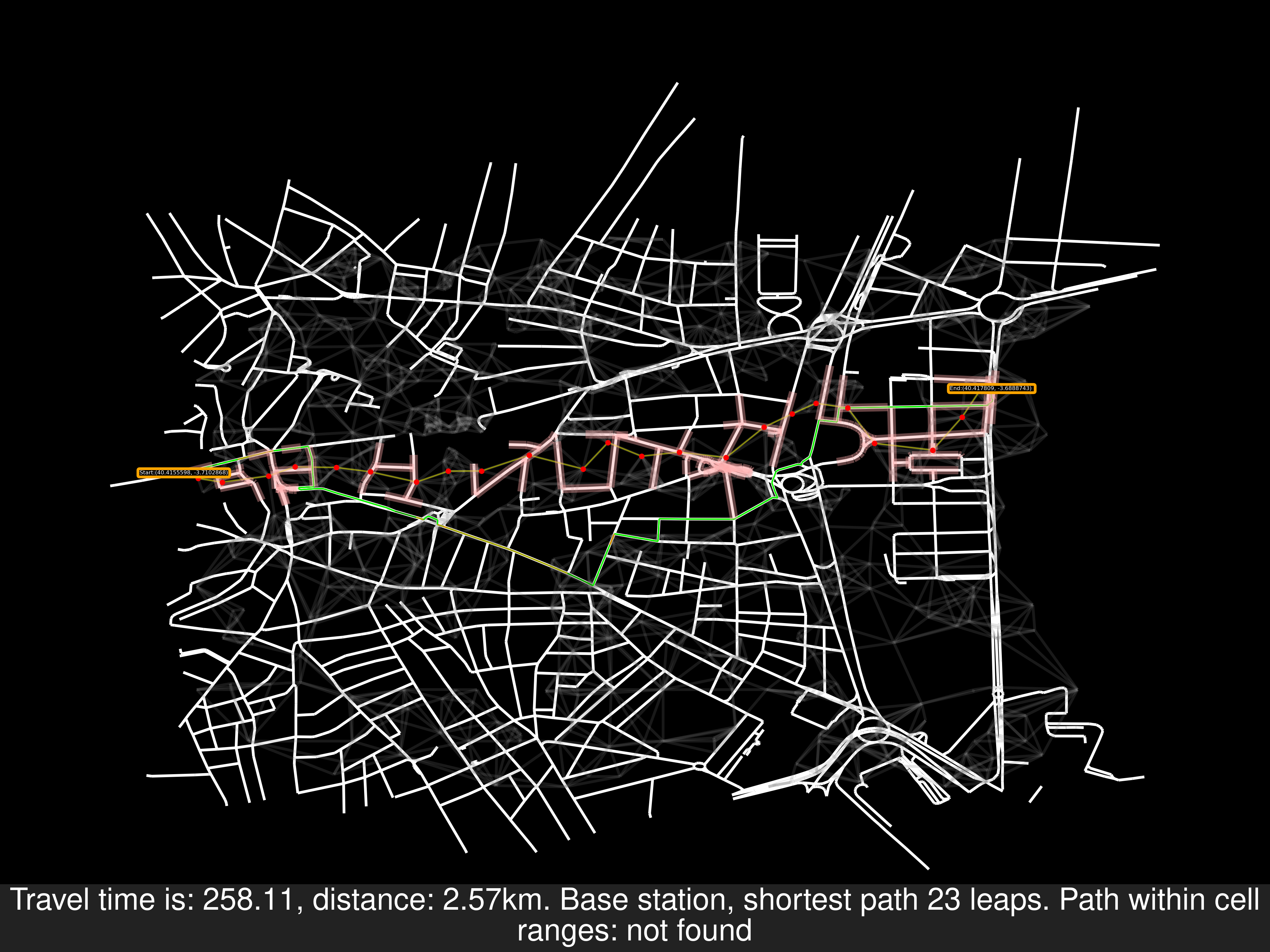
Example B of no route solving, the end node is in another road. But because there’s a path between two random points of the last and second last, but not exactly from the source to the end. Will add the points in the labels of the pictures, for replicating these errors
Other random starting and end nodes






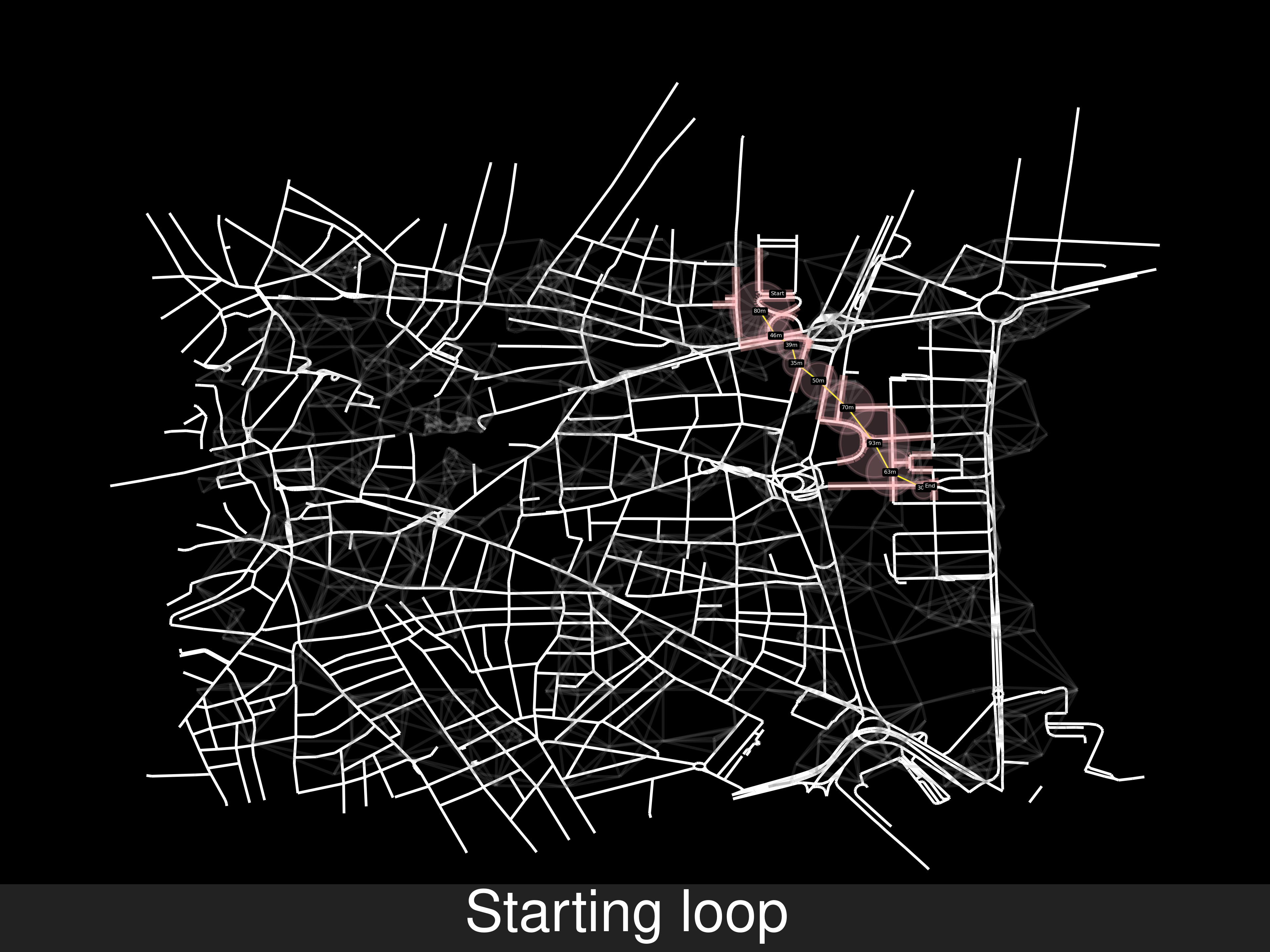
-
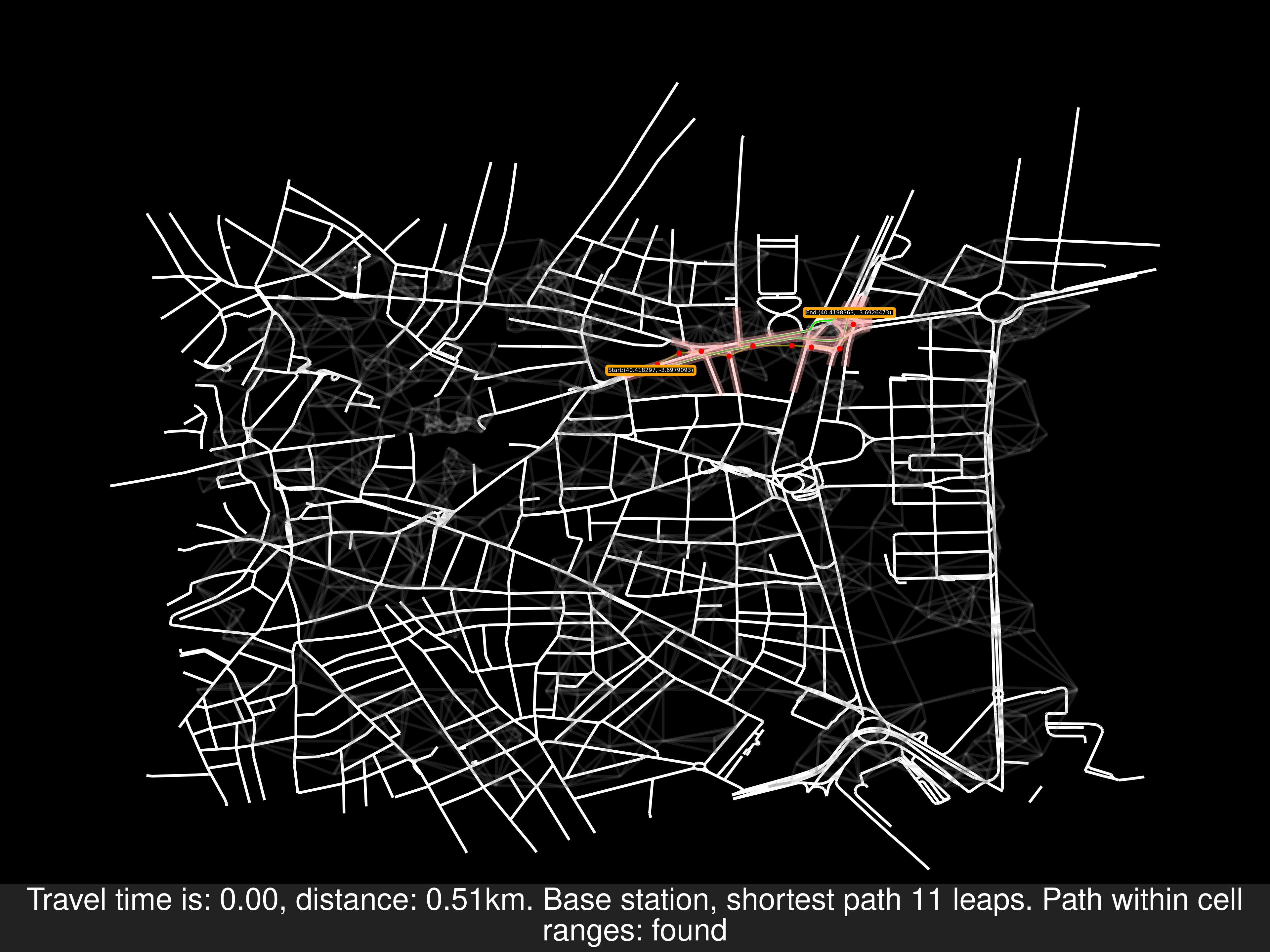
Example C, another ok result



-
Weird result:
- Iteration_1 Iteration_2 Iteration_3 Iteration_4
- Iteration_5 Iteration_6 Iteration_7 Iteration_8
- Iteration_9 Iteration_10 Iteration_11 Iteration_12

- Increasing every cell’s range
data0['range']=min1*2 if min1 < 50 else min1*1.3.Future solutions:
- Discard roads with no cell coverage
- Find shortest road path (Ignoring cells)
- Check for cells within the path.
- Repeat first step until the target is reached
- Choose the closer cells to each road as the cell graph
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Semi-conclusion
-
Conclusion from the algorithm: Once the entire map is covered, it’s slower trying to find a road path which fits the cell path than what we are doing, finding a cell path which contains a valid route. Hence, there’s an innherent trade off between shortest path in road (minimum distance or time) and cell’s required per travel.
-
Conclusion from the data:
- It’s not realistic using SOI because it sets a circular range with tons of holes, which is rare in a high concentration of base stations, where this high number(cells/sqmeter) is due to the ammount of people/robustness to failure.
- We have to ignore the range of each cell, reported by opencellid
- It’s reasonable to think that in a city, every place is in coverage of at least 1 cells.